「空気圧駆動ソフトアクチュエータと私」
ロボティクス学科 和田 晃
ロボティクス学科の和田晃と申します.2017年4月からこちらにお世話になり早一年が経ちました.今回はこれまでに私が携わってきた研究,本学での研究についてそれぞれ述べさせていただきます.高校生のときに「ロボット研究者からのメッセージ」という本に出会い,その中で紹介されていた“空気圧によって駆動する柔らかいアクチュエータ”に興味を持ちました.それがきっかけで,その研究室のある大学に進学し,この分野の研究に携わってきました.
1. 最小径McKibben型人工筋肉
“空気圧によって駆動する柔らかいアクチュエータ”の一種にMcKibben型人工筋肉があります(図1).このアクチュエータを利用したロボットアーム,ヒューマノイド,パワーアシストスーツが数多く研究されてきました.この研究の目的は,当時最小径だった直径1 mmの大きさを実現してその駆動特性を明らかにすることでした[1].McKibben型人工筋肉は空気圧をかけると収縮するアクチュエータです.シリコーンゴム製の円筒部材に対して細く紐状にした剛体(硬質)素材を時計/反時計回りに螺旋状にはわせた構造により,空気圧をかけた際に軸方向に収縮して径方向には膨張する異方性弾性体となります.
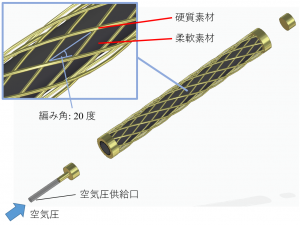
図1 McKibben型人工筋肉
2. 剛性変化型大腸内視鏡
上記のMcKibben型人工筋肉の編み角を55度に設定した場合,収縮動作は起こらず構造体の剛性のみを高められるデバイスとなります.この仕組みは高圧がかかる配管にも利用されており配管の伸長/収縮を抑制しています.この研究では,このデバイスを直列に接続して内視鏡とし,大腸内への挿入をより簡単に,最終的には自動で行えることを目指しました[2].
3. 水の電気分解/合成を利用したガス圧制御システム
流体圧を制御するシステムとして外/内燃機関がありますが,空気圧アクチュエータを制御する場合に現在主流で行われる方法は,電磁モータの駆動により密閉空間内の空気を圧縮することです.この研究ではより軽量で小型なシステムを実現するために水の電気分解/合成反応を利用しました[3-4].プロトン交換膜に触媒物質を塗布したコンパクトな構成で高圧域でも制御可能です(図2).
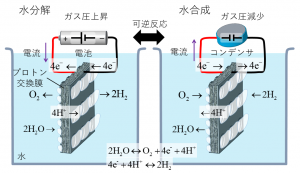
図2 固体高分子形燃料電池を用いた水の電気分解/合成反応
4. マルチマテリアル3Dプリンタの特長を活かしたソフトアクチュエータ
3Dプリンタブームが到来し,様々な機種の3Dプリンタが販売されていますが,本学では造形物の材料特性を数十段階に変更可能であるマルチマテリアル3Dプリンタを導入しております[5].これを利用するとソフトアクチュエータの動作を決定する異方性をこれまでよりも高精度に設定できるため,この特長を活かしたソフトアクチュエータの開発を行っております[6-8].図3はその一例で,硬/軟質素材を分布的に配置し,径方向の弾性値を増加させたアクチュエータです.図3(c)は,図3(a)右端の空気室に空気圧をかけたときの湾曲動作です.
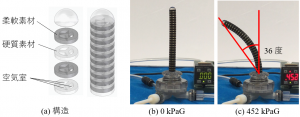
図3 径方向弾性値増加型3自由度ソフトアクチュエータ
参考文献
[1] 山本陽太,脇元修一,鈴森康一,和田晃,“細径マッキベン型アクチュエータの開発”,日本機械学会 2012年度年次大会,J113033,2012.
[2] 和田晃,脇元修一,鈴森康一,山本陽太,“腸壁負荷計測ファントムを用いた剛性変化大腸内視鏡の最適駆動パターンに関する実験的検討”,日本機械学会 2012年度年次大会,S116045,2012.
[3] A. Wada, H. Nabae, T. Kitamori, K. Suzumori, “Energy regenerative hose-free pneumatic actuator,” Sensors and Actuators A: Physical, Vol. 249, pp.1?7, 2016.
[4] Evan Ackerman, Pneumatic Generator Could Make Soft Robots Useful, A small reversible gas generator could solve soft robotics’ actuation problem, 15 Oct 2015 | 18:55 GMT.
[5] Stratasys, www.stratasys.co.jp/3d-printers/production-series/connex3-systems
[6] 和田晃,森佳樹,Zhu Mingzhu,川村貞夫, “簡易組み立て可能なモジュール型空気圧アクチュエータ ?第1報:伸長型アクチュエータの実現-”,日本ロボット学会学術講演会,2F2-03, 2017.
[7] R-FACE, http://www.ritsumei.ac.jp/research/branding/movie/
[8] 和田晃,川村貞夫,“粘弾性値の分布設定によるソフトメカニズムの実現 ―第1報:軟・硬質要素の組み合わせによる3自由度関節の実現―”,ロボティクス・メカトロニクス講演会2018,1P1-G08,2018.