立命館大学理工学部機械工学科とロボティクス学科において優秀な成績を修められ、機友会賞に値するものと認められた学生に贈られる賞です。受賞者には賞状と副賞が贈られます。
「機友会賞受賞の感想」
立命館大学理工学研究科 三森友貴
立命館大学理工学研究科機械システム系ロボティクスコース修士課程1回生の三森友貴(みもり ゆうき)と申します. 学部4回生の時点では小澤隆太教授のマニピュレーション研究室に所属しておりました. 現在は, 平井慎一教授のソフトロボティクス研究室に所属しております.興味のある研究分野はロボットハンドによる物体操作です.
この度は栄誉ある賞を賜りまして, 大変光栄です. 名前を呼ばれて教壇のほうへ向かう際に感じた, 照れくささと嬉しさの入り混じった感情を今でも思い出します.賞を授与していただいた機友会の皆様, 大学でお世話になった先生方, 先輩と学友,基礎を築いてくださった中高時代の恩師,父母, これまでお世話になったすべての方に大変感謝しております.
今回は機友会受賞にあたって文書掲載の契機をいただきました. つたない文ではありますが, これまでの取り組みについて紹介をさせていただきたいと思います.
学部時代は, 立命館大学理工学部プロジェクト団体のロボット技術研究会に所属していました.今でも印象深いのは, 学部2回生のときに参加したキャチロボバトルコンテストです.株式会社京都製作所本社で毎年開催されています.この大会では, フィールドに配置されたお菓子をロボットで回収し, 所定の位置に収めた数を競う競技が行われます. チームではロボットの制御プログラム作成を担当し, モータ制御などを学ぶことができました. 機器とマイコン間の通信トラブルに見舞われた際には, 回路担当のチームメイトと協力して原因を突き止めました. ここでは,他人と協力する経験, 根気強く問題の原因を調べる経験, 問題解決にあたって技術を自学で習得する経験などを積むことができました.
4回生に入ってからは研究室で電動義手に関する研究を行っていました. 新たな電動義手に期待される機能の一つとして, 多様な把持形態や指先による物体操作が挙げられます. このような機能を用いる動作例としては, ペットボトルキャップを捻る動作などが存在します. このような電動義手を開発するにあたって, 複数の要求と制約を考慮する必要がありました. まず要求は, ①駆動自由度を上げること, ②十分な把持力を発揮できることの二つです. 制約は, ①重量, サイズをできる限り小さく留めること, ②機構を手形状に近づけることの二つです. 要求と制約は互いにトレードオフの関係を有しているため, 要求を満たす設計を簡単に実現することはできませんでした. そこで, 上記制約条件下で要求を最適化する指関節配置を導出しました. 時間の都合上拇指のみの導出となりましたが, 脱力時の自然な拇指形状(図1)と, 制約条件下において最適な操作能力 (可操作性)を有する関節配置を提案することができました.

図1. 拇指脱力姿勢図 (中指, 示指, 拇指を配置)
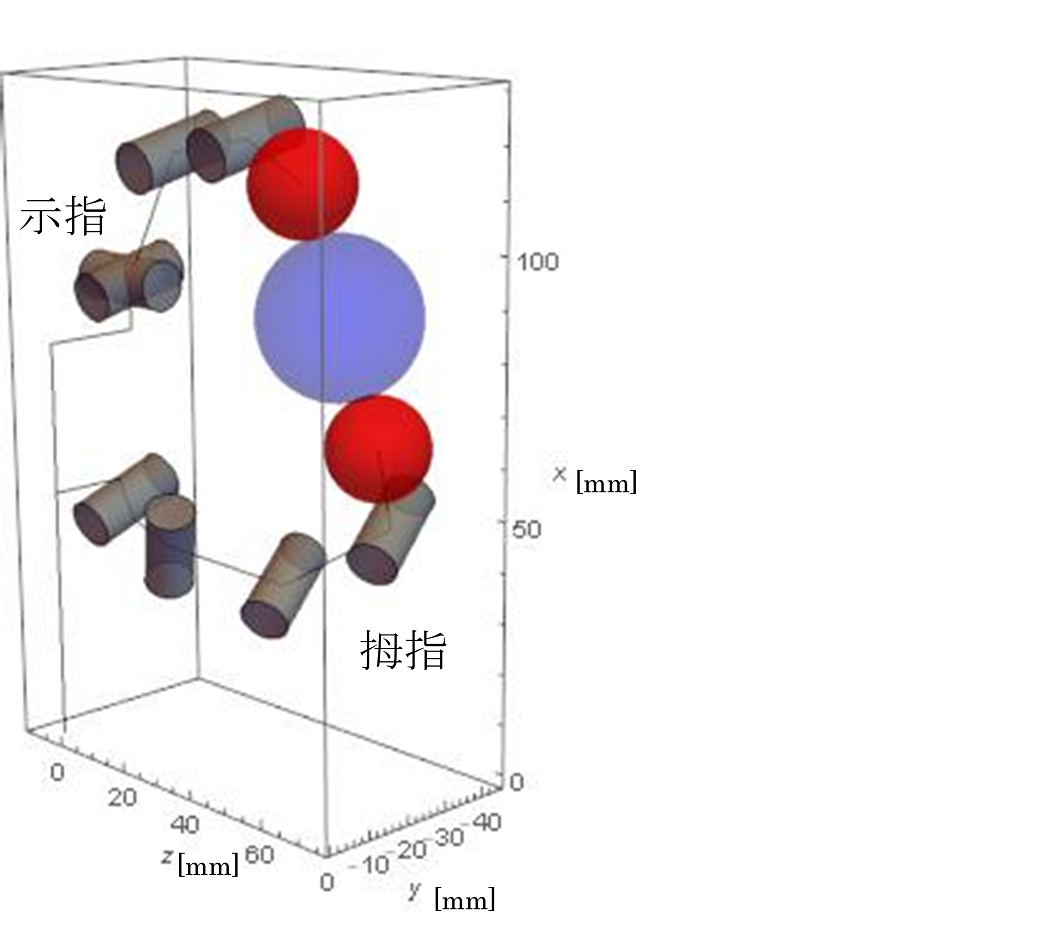
図2. 関節配置案を適用した示指, 拇指図.
青い球はペットボトルキャップ径の球体.