2019年4月から助教になられた先生方を紹介します。今回は有田輝先生です。
・略歴
2019年4月にロボティクス学科の助教として着任したばかりの有田輝と申します。触覚を空間方向に拡張した“触れない触覚”(=“近接覚”)を付与するためのセンサ、およびその利用方法の研究に取り組んでいます。近接覚はヒトにない不思議な感覚ですので、イメージしにくいかと思いますが、図1に示すように漫画アニメでよくある“オーラ”のようなもの、と思って頂くのが近いと思います。
図1:近接覚のイメージ(下条研HP※より)
学部・修士では電気通信大学の下条教授の下で主にセンサ開発に取り組み、修了後には企業で工場自動化用センサの新商品開発に携わっていました。ここまでセンサ自体の開発に没頭しておりましたが、センサの利用方法も含めて総合的に検討したいという欲求が生まれ、これを抑えきれずに企業を退社、再び電気通信大学に戻り、明教授の下で二足歩行ロボットへのセンサ利用について研究していました。この研究との関連もあり、現在は玄准教授の研究室でお世話になっております。
・研究内容
図2に私が最初に開発したセンサの写真を示します。点在する黒い部品の1つ1つが、赤外LEDとフォトトランジスタの組である検出素子:“フォトリフレクタ”です。この検出素子同士の結合方法を工夫することによって、信号の伝搬と簡単な演算を同時に行います。例えば図2のセンサからは、近傍の物体の方向(方位角・仰角)と大まかな距離を示す信号が出力されます。大部分の演算が既に回路内で行われているため、ロボットはこれを簡単に利用することができ、高速な対応動作の実現が可能になります。
玄准教授の研究室ではパワフルな油圧アクチュエータを利用した運動性能の高いロボットが多数研究開発されています。今後の私の研究は、先述のセンサをどのようにしてこれらのロボットに導入し、高いパフォーマンスへと繋げていくか、が焦点になっていきます。関連する要素や技術が多く、困難が予想されますが、現在の環境であれば何とかなるだろうと思っています。
まだ私が立命館大学にきてから間もないですが、諸先生方の研究や勤勉かつ活発な学生さん等によって刺激され、既に多くの影響を受けていると感じます。この刺激の波に上手く乗ることができれば、上記の困難も突破できると考えています。今後とも精進してまいりますので、皆様どうぞよろしくお願い致します。
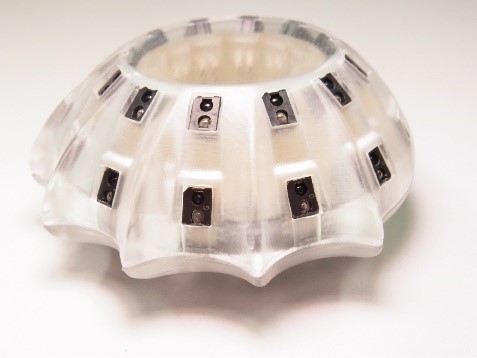
図2:ドーム型近接覚センサ
※http://www.rm.mce.uec.ac.jp/sj/index.php?Shimojo%20Laboratory (Accessed on 2019.4.25)
