ロボティクス学科ソフトロボティクス研究室の平井と申します.ワイン注ぎロボットチャレンジを紹介いたします.
ソフトロボティクス研究室では現在,食品ハンドリングに関する研究を進めています.食品の製造工程は,今でも人手に頼る部分が多く,多くの人が働いています.一方で,数年前から,人手不足が深刻になっていました.さらに,COVID-19の影響で,同時に働く人数を減らす必要が生じています.そのため,食品産業では,自動化への高い要望があります.このような状況を鑑みると, 食品ハンドリングに関わる研究者を増やし,研究を加速する必要を感じていました.
多分野の技術が必要となるロボティクスでは,チャレンジを通して課題解決を図るという試みが成されています.代表例として,米国DARPAが企画したDARPA Robotics ChallengeやAmazonが主催したAmazon Picking Challengeがあります.2019年のIEEE Humanoidsのワークショップで,食品マニピュレーションに関する研究者が集まり議論しました.そのとき,研究者のコミュニティを拡大する手段として,ロボットチャレンジの話がありました.ワークショップに引き続き,2020年のIEEE/RSJ IROSにおいて Forum on Robotic Food Manipulation Challenge を企画しました.それに合わせて,チャレンジを研究室内で試みたのが始まりです.
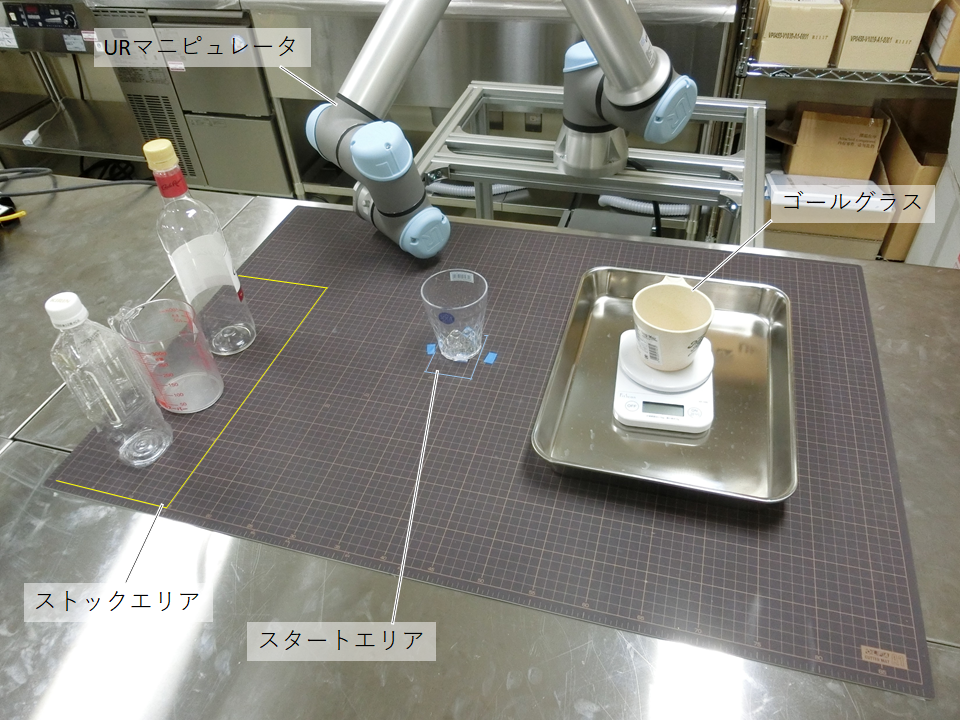
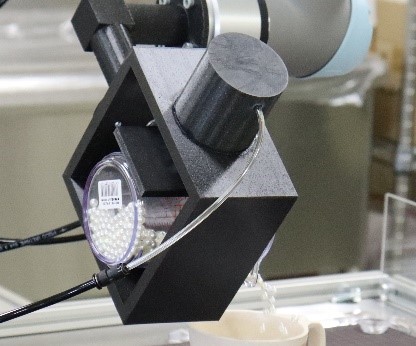
ワークショップやフォーラムでどのようなチャレンジを行うかを議論しました.ワイン注ぎ,バナナのカッティング,サラダの盛り付けなど,いろいろなアイデアがありました.まずは,簡単そうな課題から試してみようということで,ワイン注ぎを題材としました.ワイン注ぎロボットチャレンジのフィールド(写真)には,ロボットマニピュレータとテーブルがあり,テーブル上にはワインの容器とゴールグラスがあります.容器には,ワインの代わりにビーズが入っています.参加者は,容器を持ち上げるロボットハンドを設計し,試作します.試作したロボットハンドをロボットマニピュレータに取り付け,ロボットを動かします.ロボットは容器を持ち上げ,ワインの代わりのビーズを,ゴールのグラスに注ぎます.グラスの下の電子秤で注がれたビーズの重量を測り,得点とします.いろいろな容器を持つことができるロボットハンドを作って欲しいので,ワインボトル,PETボトル,コップ,計量カップという4種類の容器で競うことにしました.
参加者は,研究室に配属されたばかりの学部生です.参加者は,いろいろなロボットハンドを考えて,試作しました(写真).たとえば,上段左のハンドは,容器を上から包むように持っています.どうやってビーズをゴールグラスに注ぐのでしょうか.ハンドの上部に穴があり,ハンド全体をひっくり返すと,ビーズは穴を通って外に出るという構造です.上段右のハンドは,柔らかい材料のみで作られた指を用いています.指の内部に空気圧を加えると,指が曲がります.また,下段中央のハンドは,ジャミングハンドと呼ばれており,袋の中に粉が入っています.袋内部の圧力を下げると,袋全体が硬くなり,容器を持つことができます.それぞれのハンドの動作は,写真をクリックするか,2021年のサイト,2020年のサイト,あるいはロボティクス学科チャンネル内の動画をご覧ください.いろいろなアイデアが出てきますので,見ていて楽しくなります.


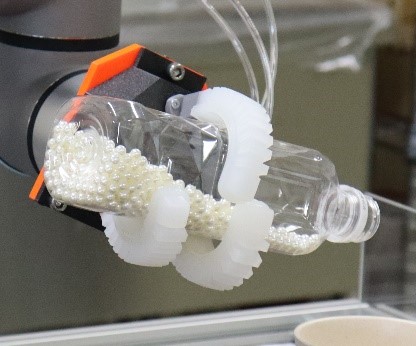

参加者が試作したロボットハンド
食品ハンドリングに関する研究を加速するという当初の目的に加えて,個々のアイデアを実現するという過程を参加者が実感する機会になりますし,なによりも見ていて楽しいので,題材やルールを変えながら,チャレンジを続ける予定です.また,日本ロボット学会の産学連携調査研究委員会では,食品サンプル規格標準化WGを組織し,ハンドリングの試験に必要な食品サンプルに関する議論を進めています.このような内外の動きと連動しながら,チャレンジを発展させたいと考えています.
フィールドの設計,ルールの設定,技術的なサポートに関して,松野先生,王先生,院生の西田君,古田君,盛影君,宮越君の多大な協力を得ました.改めて感謝申し上げます.また,ロボティクス学科チャンネルの動画は,植村先生が編集しました.感謝申し上げます.